基于TogetherROS.Auto的地平線智能駕駛軟件開發范式探索 技術公開課全程實錄與開發實踐
在智能駕駛技術飛速發展的今天,高效、可靠且可擴展的軟件框架是推動行業創新的核心引擎。地平線推出的TogetherROS.Auto,正是為智能駕駛場景量身打造的高性能機器人操作系統。本文旨在深入解析基于TogetherROS.Auto的智能駕駛軟件開發范式,并結合技術公開課的核心理念,為開發者勾勒出一條清晰的軟件技術開發路徑。
一、TogetherROS.Auto:智能駕駛的軟件基石
TogetherROS.Auto并非簡單的ROS 2分支,而是地平線基于多年車載計算實踐,深度融合了車規級安全、實時性需求與AI計算特性而深度優化的產物。它針對自動駕駛的高并發、低延遲、高可靠性挑戰,在通信中間件、資源調度、工具鏈等方面進行了大量增強與創新。其核心價值在于,為開發者提供了一個從芯片到應用的全棧式開發平臺,顯著降低了將算法模型部署到車規級硬件上的復雜度與門檻。
二、核心開發范式:從“軟硬協同”到“應用迭代”
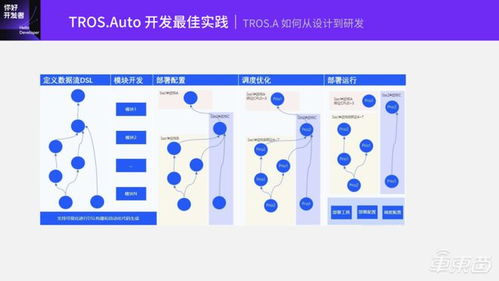
基于TogetherROS.Auto的開發,遵循一套獨特的范式,其精髓可概括為以下幾點:
- 軟硬一體優化:開發始于對地平線征程系列芯片算力與能效的理解。TogetherROS.Auto深度集成了BPU(Brain Processing Unit)的異構計算能力,提供了高效的AI推理框架與工具鏈(如模型轉換、性能分析),確保算法能充分發揮硬件性能。
- 組件化與模塊化:系統倡導基于節點的組件化設計。感知、定位、規劃、控制等模塊可作為獨立的節點進行開發與測試,通過TogetherROS.Auto提供的高性能通信層(如Cyclone DDS的優化版本)進行數據交換。這種松耦合架構極大地提升了代碼復用率和團隊協作效率。
- 車規級安全與可靠:框架內嵌了功能安全與信息安全的設計考量,提供了諸如生命周期管理、健康監控、冗余通信等機制,幫助開發者構建符合ASIL等級要求的軟件模塊。
- 工具鏈驅動的敏捷開發:強大的工具鏈是范式落地的關鍵。從可視化調試工具(如增強版的Rviz2)、數據錄制回放(Bag)、到性能剖析與系統監控,一套完整的工具集支持開發者進行快速迭代與問題定位。
三、技術公開課實錄精要:開發者上手指南
在面向開發者的技術公開課中,地平線專家通常聚焦于以下實踐環節:
- 環境搭建與初體驗:指導如何快速在X86或征程開發板上部署TogetherROS.Auto運行環境,創建第一個工作空間與功能包,并運行示例節點,建立直觀認知。
- 關鍵概念深度剖析:深入講解節點、話題、服務、動作在自動駕駛場景下的典型應用模式,以及QoS(服務質量)策略如何保障關鍵數據(如激光雷達點云、控制指令)的實時可靠傳輸。
- AI模型集成實戰:演示如何使用模型轉換工具將訓練好的深度學習模型(如YOLO、BEV感知模型)高效部署到征程芯片上,并通過ROS節點封裝,使其能夠無縫接入感知流水線。
- 系統調試與性能優化:分享利用內置工具進行系統級跟蹤、CPU/BPU負載分析、通信延遲測量的方法,從而定位瓶頸并優化系統性能。
- 仿真與實車對接:介紹如何利用TogetherROS.Auto的接口與常用仿真環境(如CARLA、LG SVL)進行聯調,并平滑過渡到實車數據閉環開發。
四、展望:構建開放共贏的開發者生態
地平線通過TogetherROS.Auto及配套的技術布道,其長遠目標在于構建一個繁榮的智能駕駛開發生態。這套開發范式不僅降低了先進自動駕駛技術的研發門檻,更通過標準化接口和豐富示例,激勵廣大開發者和合作伙伴貢獻算法模塊與應用場景,共同加速智能駕駛技術的創新與落地。
基于TogetherROS.Auto的智能駕駛軟件開發范式,代表了一種將頂尖AI計算芯片、車規級操作系統框架與具體應用需求深度融合的系統工程方法。對于開發者而言,深入掌握這一范式,意味著掌握了高效開發高性能、高可靠性自動駕駛軟件系統的鑰匙。持續關注并參與地平線的技術公開與社區互動,將是開發者在這一前沿領域保持競爭力的重要途徑。
如若轉載,請注明出處:http://www.whlsm.cn/product/39.html
更新時間:2026-02-16 13:19:46